Features
1. Input power supply voltage: 8~30V
2. Maximum output current per channel is 2.5A
3. Onboard 3.3V LDO output, maximum current 10mA
4. Input control signal compatible with 3.3V and 5V
5. Support SPWM and SPVMW control algorithms
6. Powerful open source library, quick start
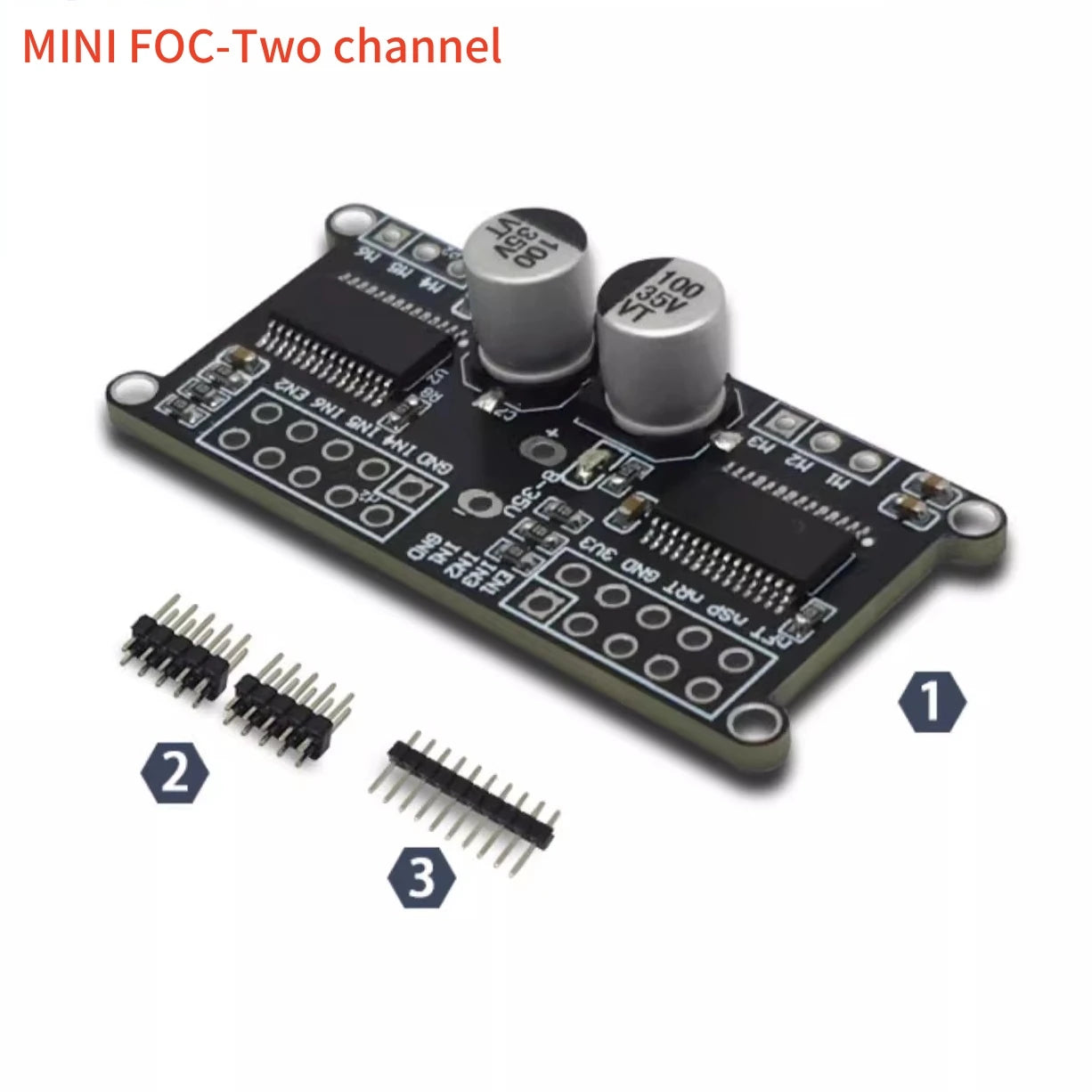
7. With dual-channel signal input and output, drive two DC brushless motors
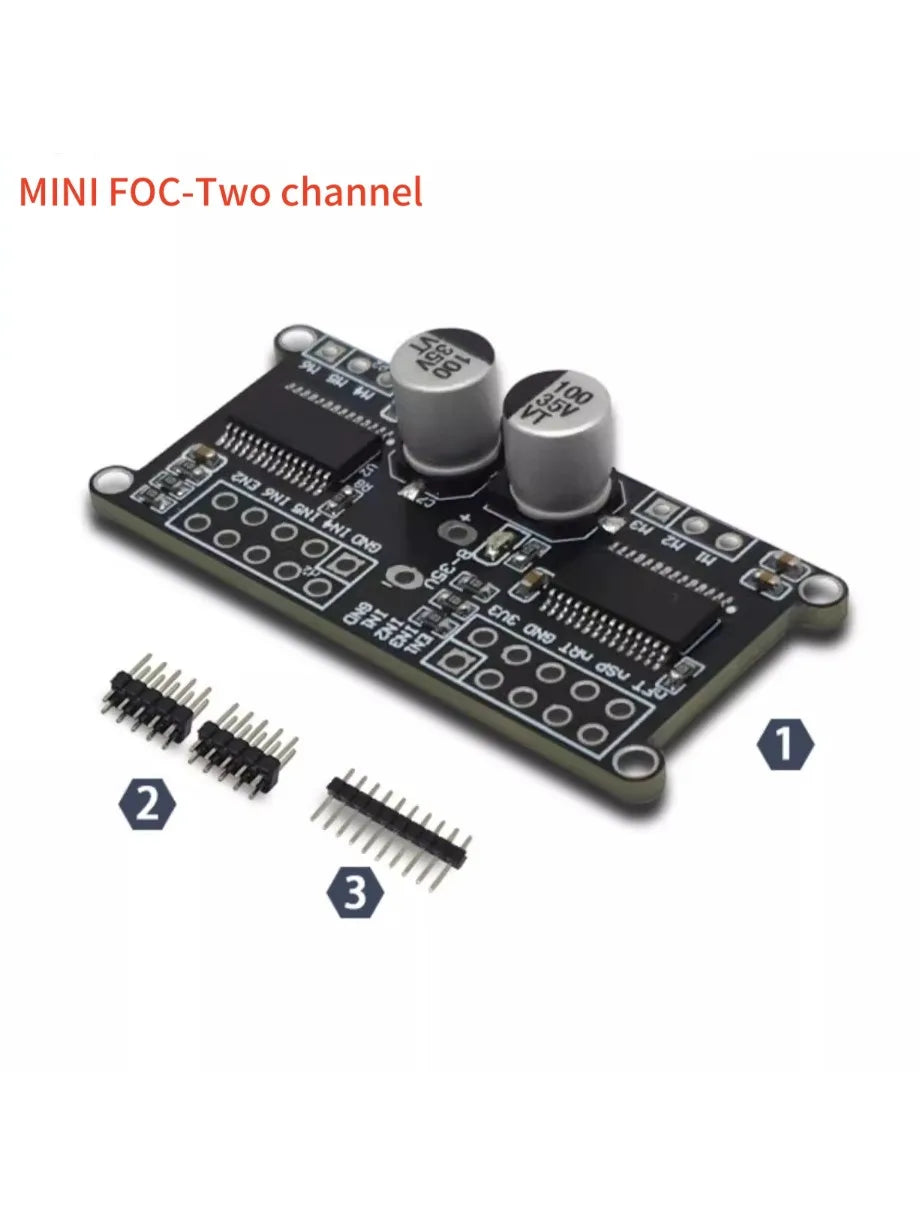
Product Overview
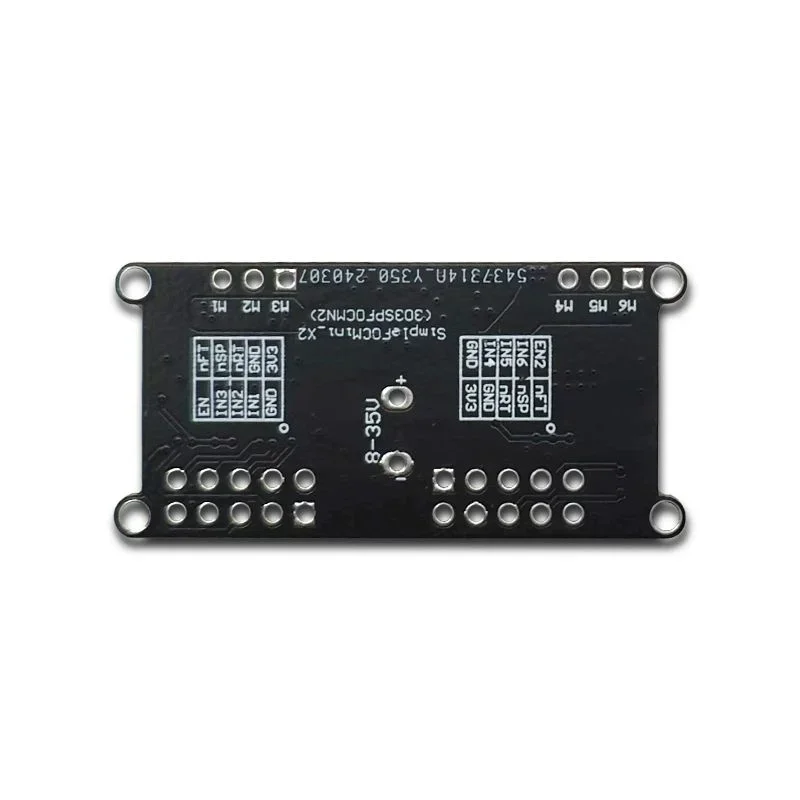
SimpleFOCMini dual-channel output DC brushless motor driver board uses domestic chip MS8313.
MS8313 provides three independently controllable half-H bridge drivers, mainly used to drive DC brushless motors. Only need to connect the control signal and the motor UVW three-phase line to control the motor rotation. Support SPWM and SPVMW control algorithms, do not support the traditional 6-step commutation control algorithm. Can be quickly used through Arduino SimpleFOC.
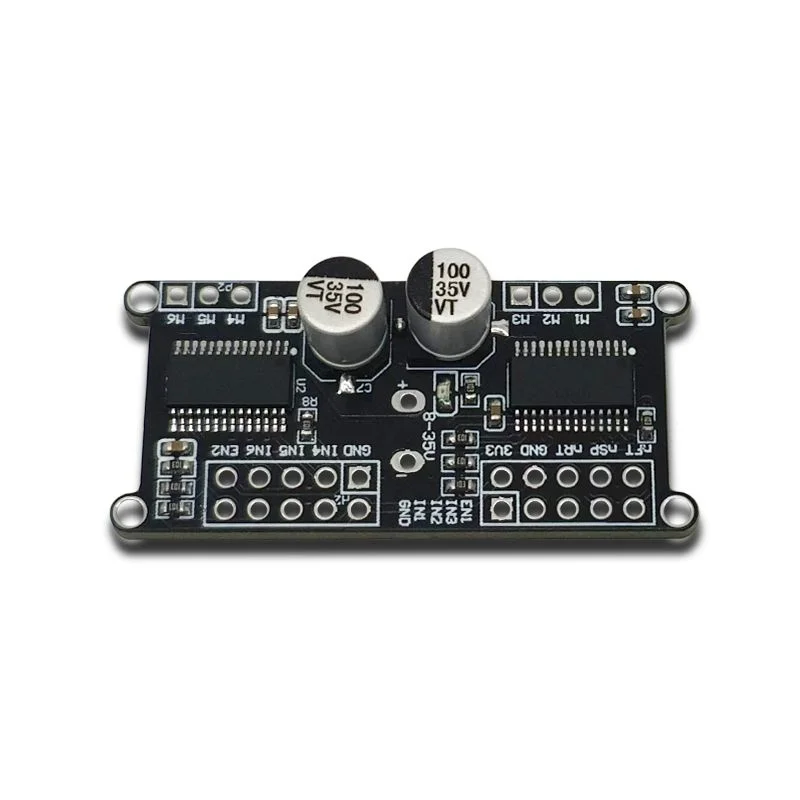
Interface
1. Power supply port: 8-35V DC
2. First input channel
3. Second input channel
4. First output channel
5. Second output channel
6. MCU: DRV8313PWPR (SOP-28)
The three wires of the three-phase brushless motor can be connected in any order. Changing the connection order of any two wires can change the rotation direction of the motor.
Control method
Here, the Arduino UNO development board is used for control. Connect as shown below
1. 12V power supply line
2. Brushless motor three-phase line
3. Signal input line
Where the connection between the Arduino development board and the driver board:
Signal line connection: 108--EN1; I09--IN1; I010--IN2; 1011--IN3
Power line connection: 3V3--3V3; GND--GND.
After connecting the data cable, install the Slimple FOC library in the Arduino IDE
Paste the following code in the IDE:
Driver test code
Note to modify the pin definition and change it to the connection pins of the simple foc mini driver board and the Ardui-no development board.
// BLDCDriver3PWM driver=BLDCDriver3PWM(pwmA, pwmB, pwmC, enable pin (optional));
BLDCDriver3PWM driver=BLDCDriver3PWM(9, 5, 6, 8);
Click the upload button to compile and download the program to the Arduino development board. Open the IDE's serial monitor and enter T6.28, and the brushless motor can rotate.